DOSITA
Data-Driven System Identification for Autonomous Marine Systems
Exploring intelligent system identification approaches for sustainable and autonomous maritime technologies.

Latest News
May 2026 – Presented the DOSITA project at the Three Minute Thesis (3MT) competition.
May 2026 – Abstract titled “From Traceable MARUS Virtual Sea Trials to Online Hydrodynamic Derivative Identification” accepted for IEEE Marine Autonomous Systems Workshop 2026 (poster presentation).
April 2026 – Successfully completed initial PhD progression review (RF1).
March 2026 – Manuscript titled “Interpretable Physics-Informed Hydrodynamic Derivative Identification for Autonomous Marine Vehicles Using Virtual Sea Trials and Symbolic Residuals” accepted for IEEE AUV 2026 (poster presentation).
March 2026 – Manuscript titled “Traceable Virtual Sea Trials in the Marine Robotics Unity Simulator for Manoeuvring Assessment of Unmanned Surface Vehicles” accepted for ISCSS 2026 (oral presentation).
Overview
Project Overview
DOSITA is a PhD research project focused on the design and development of an open-source, intelligent system identification framework for autonomous marine vessels. This research aims to contribute to the cost-effective decarbonisation and sustainable operation of autonomous marine vessels, aligned with the UK Net Zero target (Net Zero Strategy).
Motivation
Why This Research Matters
Maritime operations contribute approximately 3% of global greenhouse gas (GHG) emissions, placing growing pressure on maritime stakeholders to reduce their carbon footprint. Although sustainable fuels are under development, operational optimisation—particularly through state-of-the-art technologies—remains an immediate and effective pathway to reduce emissions.
Research
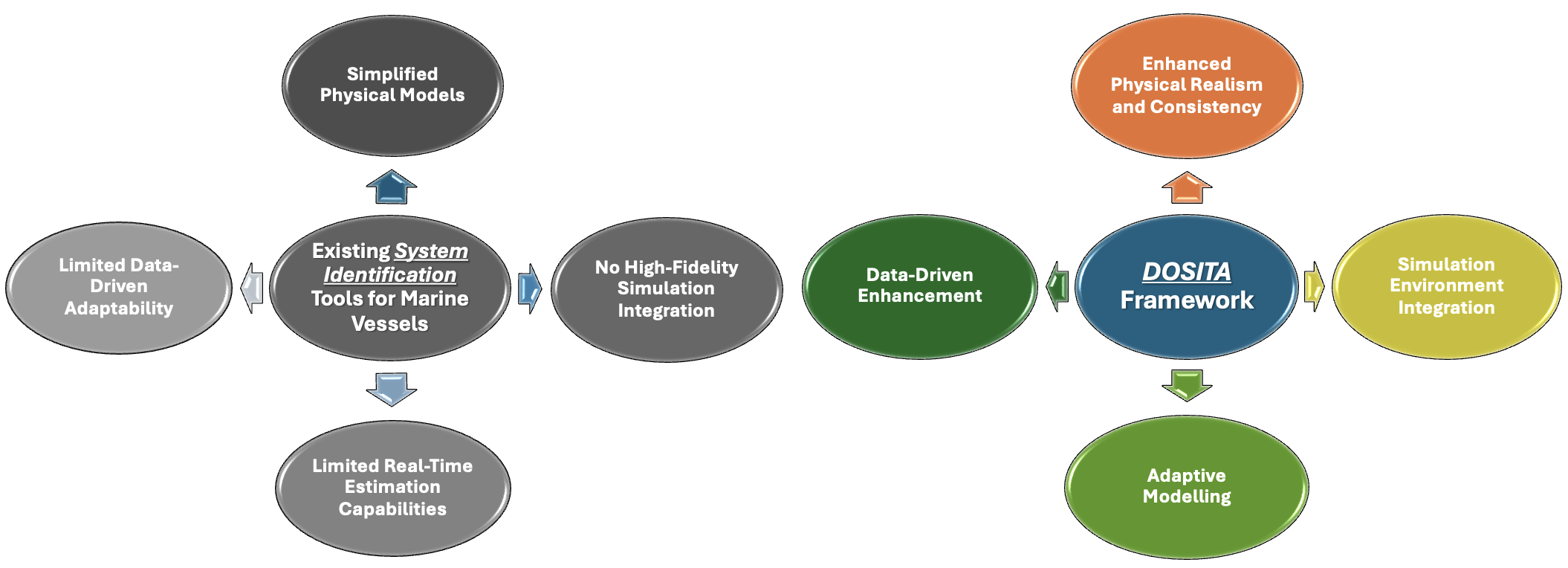
Research Direction
The research investigates data-driven approaches to simulation and modelling within marine robotics environments. The project explores how artificial intelligence and modern data analysis techniques can support the development of more sustainable intelligent maritime systems.
Research Outputs
Publications
Publications related to this research project will appear here as they become available.
-
Rezayan, P. (2025). MSc Dissertation. Preliminary research informing DOSITA.
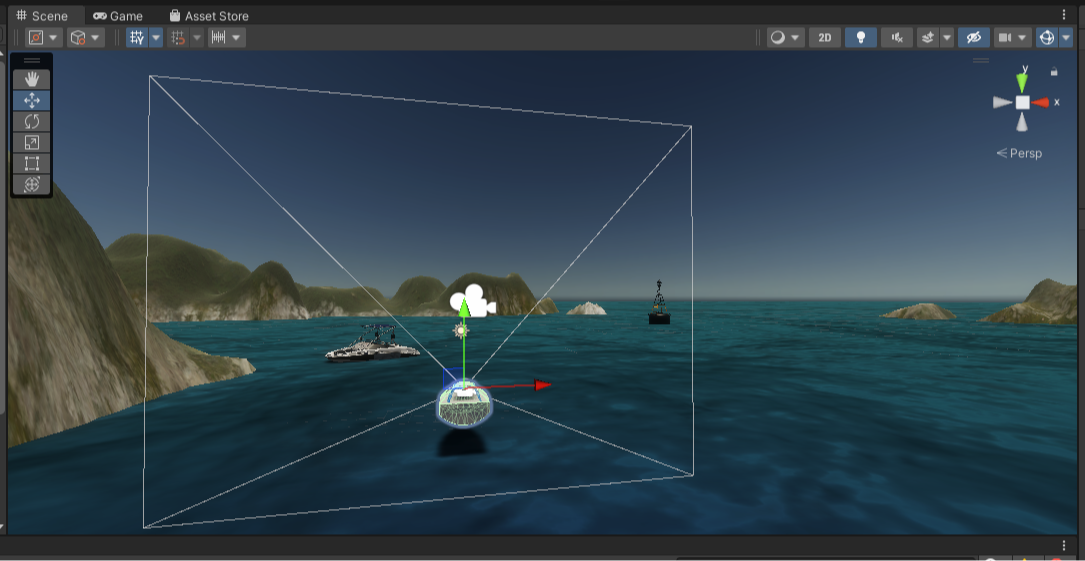
Simulation
Simulation Results
Turning Circle Test – Port
Turning Circle Test – Starboard
Zig-Zag Test (10°/10°) – Port-First
Zig-Zag Test (10°/10°) – Starboard-First
Zig-Zag Test (20°/20°) – Port-First
Zig-Zag Test (20°/20°) – Starboard-First
People
Research Team
PhD Researcher

Supervisory Team

Dr. Yogang Singh
Assistant Professor
Sheffield Hallam University

Dr. Fuat Kara
Associate Professor
Sheffield Hallam University

Dr. Konstantinos Domdouzis
Assistant Professor
Sheffield Hallam University

Dr. Michele Martelli
Associate Professor
University of Genoa